
Maximum depth of a binary tree
Let's see how to do it in Rust

A binary tree is a foundational data structure that mirrors a rooted tree concept, where each node has at most two children, commonly referred to as the left child and the right child. Binary trees are everywhere in tech: they power search operations in databases, enable efficient sorting algorithms, and form the basis of many machine learning models.
The Maximum Depth of a Binary Tree problem asks you to find the longest path from the root node down to the farthest leaf node.
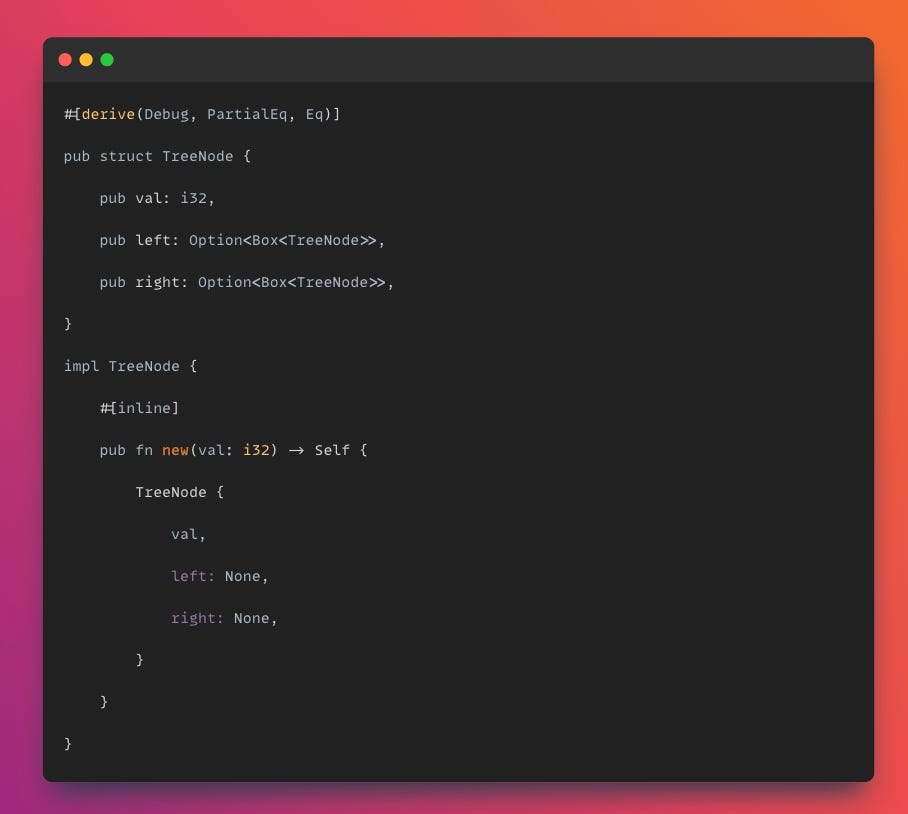
Let's break this down with a Rust example. In Rust, a binary tree is often represented by an `Option` that holds a `Box` of a tree node, like so:
And solving the maximum depth problem involves a recursive function that traverses the tree, counting the depth as it goes:

Rust's ownership model is a game-changer, especially when it comes to recursion. Because Rust enforces strict rules about how and when data is accessed, you don't have to worry about the usual memory leaks or stack overflows that can happen in other languages. These checks are done at compile time, meaning your recursive function runs without such risks, pushing you to think more deeply about your code's structure and logic.
Notice how the `Option` type in Rust elegantly deals with the possibility of a tree node being `None` - which is another way of saying that it might not exist. This is especially handy for binary trees, where leaf nodes will have children that are `None`. This built-in way to handle null values prevents a lot of common null-related errors.
Rust's `Result` type offers similar benefits. While not shown in this particular function, `Result` is used to handle operations that can fail; it makes error handling a seamless part of your code, avoiding unwelcome surprises during runtime.
Thinking about improvements and other apporaches
There are other paths to solving the problem, too, like iterative solutions using a stack or employing a breadth-first search (BFS) with a queue. These compare to the recursive method in various ways. BFS, for example, is also O(n), but can be more memory-intensive since it may need to store an entire level of the tree's nodes. On the other hand, stack-based iterative solutions mimic recursion without the same risk of a stack overflow, and they provide a different angle on the problem.
Rust's powerful iterator abstractions could lead to clean tree traversal without explicit recursion or stack management. However, for depth-first computations like maximum depth, this may not always be practical or more efficient.
Pitfalls can occur even with these strategies. Deep recursion might cause stack overflow, especially in large trees. While increasing the stack size is one approach, transforming the recursive algorithm to an iterative one using a non-recursive data structure like a stack could avoid the risk altogether:
use std::cell::RefCell;
use std::rc::Rc;
use std::collections::VecDeque;
struct TreeNode {
val: i32,
left: Option<Rc<RefCell<TreeNode>>>,
right: Option<Rc<RefCell<TreeNode>>>,
}
fn max_depth(root: Option<Rc<RefCell<TreeNode>>>) -> i32 {
let mut stack = VecDeque::new();
let mut depth = 0;
if let Some(node) = root {
stack.push_back((node, 1)); // node with current depth
}
while let Some((current, current_depth)) = stack.pop_back() {
let current = current.borrow();
depth = i32::max(depth, current_depth);
if let Some(ref right) = current.right {
stack.push_back((right.clone(), current_depth + 1));
}
if let Some(ref left) = current.left {
stack.push_back((left.clone(), current_depth + 1));
}
}
depth
}
Although I prefer the simple approach mentioned above.